



QGroundControl
Descriere QGroundControl
QGroundControl asigură controlul și configurarea completă a zborurilor pentru vehiculele alimentate de la ArduPilot sau PX4 Pro. Scopul pentru QGroundControl este îmbunătățirea ușurinței de utilizare a noilor utilizatori, precum și suportul de înaltă calitate pentru utilizatorii experimentați.
Funcțiile QGroundControl:
- suport complet pentru vehiculele care rulează firmware-ul PX4 Pro și ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub);
- Planificarea misiunii pentru zborul autonom
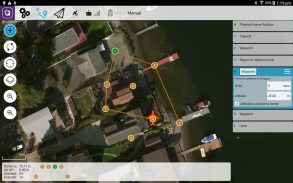
- afișarea hărții de zbor indicând poziția vehiculului, pista de zbor, punctele de parcurs și instrumentele vehiculului
- streaming video cu suprapunerile afișajului instrumentului
- Suport de zbor pentru orice vehicul compatibil cu MAVLink
QGroundControl este, de asemenea, disponibil pentru Windows, MacOS, Linux și iOS.
Note de lansare
Site-ul oficial QGroundControl
Documentație
Asistență
QGroundControl - Versiune 4.1.1
(29-01-2021)QGroundControl - Informații APK
Versiune APK: 4.1.1Pachet: org.mavlink.qgroundcontrolCea mai recentă versiune a QGroundControl
Alte versiuni














Aplicații din aceeași categorie

S-ar putea să îți placă și...







